美国犹他大学(University of Utah)的研究人员新研发了一种机器人,会用“人猿泰山”的摆绳(swinging rope)技巧来攀爬墙面。这种被称为“摇晃-攀爬-摆动机器人(rocking-climbing-oscillating robot,RCOR)”的新研发成果,号称是全世界最有效率的攀登高手,能用以做为大楼、桥梁、水坝、水库、核能设施或是建筑物内部的勘察员。
RCOR的发明人、犹他大学教授William Provancher表示,到目前为止,对攀登用途机器人的研究都集中在勾抓的技巧以及速度:“RCOR是第一个锁定攀登效率(efficiency)的研究。”他指出,该机器人重1.2磅、尺寸18x12.2吋,攀爬速度只有每秒6.2吋,但其效率可达到创纪录的20%。
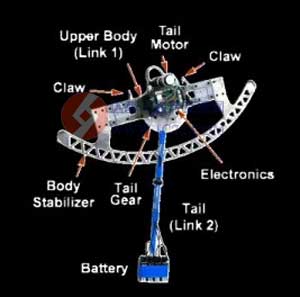
RCOR有一个钟摆状的尾巴(用电池作为安定器),并因此取得高度,以钩爪反复、棘齿轮向上的方式攀爬
RCOR有两个用以抓住墙面的钩爪(claw),内部的微控制器会驱动小型马达,让钟摆状的尾巴摆荡、以取得高度;然后其反向的爪子会以棘齿形式往上数寸,让机器人能在约15秒的时间内摆动攀爬过8英呎高的墙。
Provancher的研究团队成员还包括博士生Mark Fehlberg、他以前的学生Samuel Jensen-Segal;美国国家科学基金会(NSF)与犹他大学都是该研究项目的赞助者。