
摘要:分析智能型电动执行机构的技术要求,提出了转子磁场定向的空间矢量控制方案,通过坐标变换得到了适用于矢量控制的同步旋转坐标系统(M—T)下的感应电机数学模型,推出了转子磁场定向方程。以英飞凌微处理器XCl61CS-32F为核心,建立智能型电动执行机构驱动控制系统。利用了CAN总线和1PROF、IBUS—DP技术,对驱动控制系统进行调试控制。给出了软件流程及PISM仿真环境下的部分仿真结果和试验结果。实验结果表明转子磁场定向矢量控制策略是可行的,控制系统具有良好的动态性能和稳态精度。
0 引言
电动执行器是分布式控制系统重要的终端执行设备,广泛应用于冶金、电力、化工等部门。电机是电动执行机构的关键部件,要有优良的静动态特性和转矩特性,来满足电动执行机构频繁的启动、停止的需求。
目前,电动执行机构交流电机及驱动控制系统通常采用两种控制方法:转子磁场定向矢量控制(RFOC)和直接转矩控制(DCT)。DcT控制在电机低速时易产生波动、没有电流闭环,易产生过流,不能满足电动执行机构低速启动稳定大转矩的要求。RFOC具有类似直流电机良好的转矩控制特性:英飞凌公司的XCl6l系列是专为电机驱动而设计的微处理器,具有快速运算能力和数据处理能力,可快速实现复杂的控制算法:可以实现自适应控制对电机进行实时辨识与校正。采用自适应控制可提高驱动系统效率,实现最大效率控制。本文基于xCl61CS-32F微处理器采用转子磁场定向矢量控制策略构建执行型电动执行机构驱动控制系统。
1 矢量控制基本原理
1.1 概述
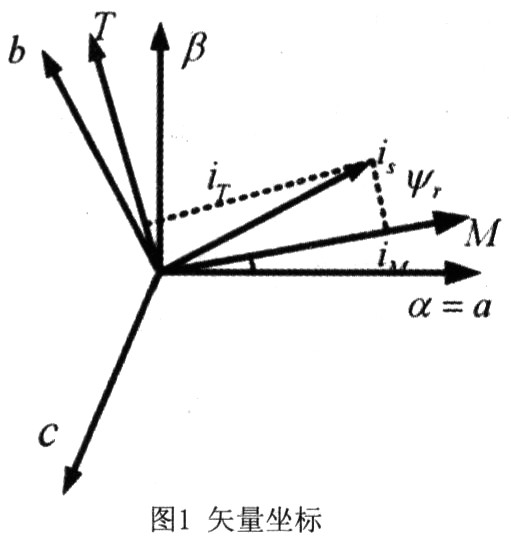
交流电机矢量控制概念最早是由德国学者K.Hass博士提出的。1972年,德国Siemens公司的F.Blaschke将这种一般化的概念形成系统理论,定名为磁场定向控制[1]。该理论通过矢量旋转变换和转子磁场定向,把定子分成两个正交分量;一个是用来产生转子磁通的励磁分量im,另一个是用来产生电磁转矩的转矩分量ib由此实现了对转矩的动态控制。矢量控制技术的关键就是磁场定向,当选取转子磁链矢量ψr作为同步旋转两相坐标系的M轴定向坐标,即M轴与转子磁链同向。则为转子磁场定向。
(如图1所示)
1.2 异步电机按转子磁场定向控制数学模型
异步电动机电压方程和磁链方程分别如下[2—3]。
(1) 电机电压方程
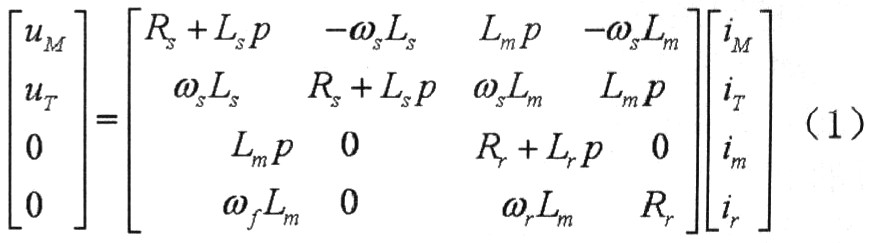
(2) 电机磁链方程
采用转子磁场定向,即M轴与转子磁链ψr一致,故ψr只有M轴分量,即ψm=ψr而转子磁链的T轴由分量为零,即tψ=0。于是电机的磁链方程为:
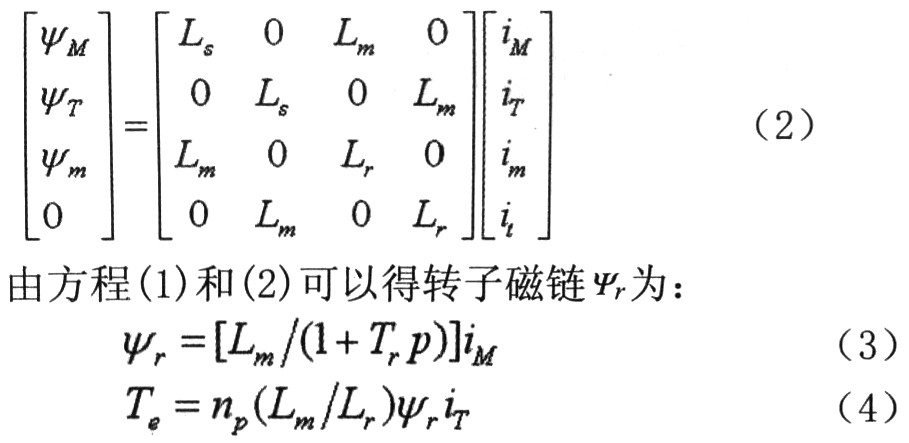
式中Tr为转子时间常数Tr=Lr/Rr;nP沩电机的极对数;Te为电磁转矩。
从式(3)中可以看出,在定子电流的两个分量之间实现了解耦,im唯一决定磁链ψr,当磁通不变时,ir则只影响转矩,与直流电机中的励磁电流和电枢电流相对应。
由交流电机数学模型可知,当电机转子磁场定向准确时,转子磁通T轴分量为0,因此定子电流的M轴分量iM与转子磁通φr有如下关系:
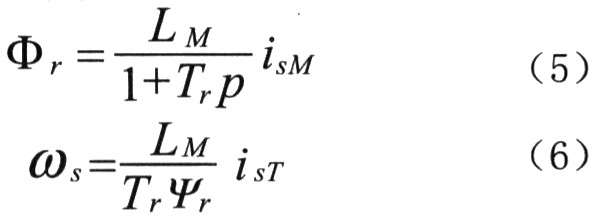
由于对空间磁场转速的积分就是其位置角,而定向磁场的转速等于转子转速ωr和转差角速度ωs之和,所以定向磁场位置角为θe .
矢量控制系统原理图如图2所示。其中磁场定向模块以定子MT轴电流和转速作为输入,输出转子磁通角,以进行正确的磁场定向。

2 控制系统软硬件设计
2.1 控制系统硬件设计
驱动系统的主回路采用了传统的交一直一交的拓扑结构。该驱动系统核心控制芯片采用了英飞凌(Infineon)公司的XCl61CS-32F,该微控制器XCl61CS基于增强C166S V2结构,结合了RISC和CISC处理器的优点,并且通过MAC单元的DSP功能实现了强大的计算和控制功能。可以进行数字滤波算法,并大大减少了乘除法的运算时间;5级流水线和125ns单指令执行时间,以及在全部的可寻址地址空间进行PEC传输。这些I生能使其具有良好的数据处理能力[5—6],完全可以胜任矢量控制算法的实现。
XCl61CS把功能强尽的CPU内核和一整套强大的外设单元集成于一块芯片上,使得连接变得非常有效和方便。同时器件上还集成了多种先进的外设,如10CDS、ADC、SSC、ASC、IIC等总线接口,丰富的I/0口,多达99个,还有TwinCAN总线接口。可以在现场完成PC机通信,便于电动执行机构调试和参数设置。采用PROFIBUS—DP接口的冗余控制方案实现了电动执行机构和中控机通信,实现远程控制。通信电路采用高速光藕隔离电路,准确快速的实现控制信号的传输。
E2PROM记录电机正常工作的工作参数,实现电动执行机构开机时参数的自检。当微处理器监测到故障信号时,立即切断
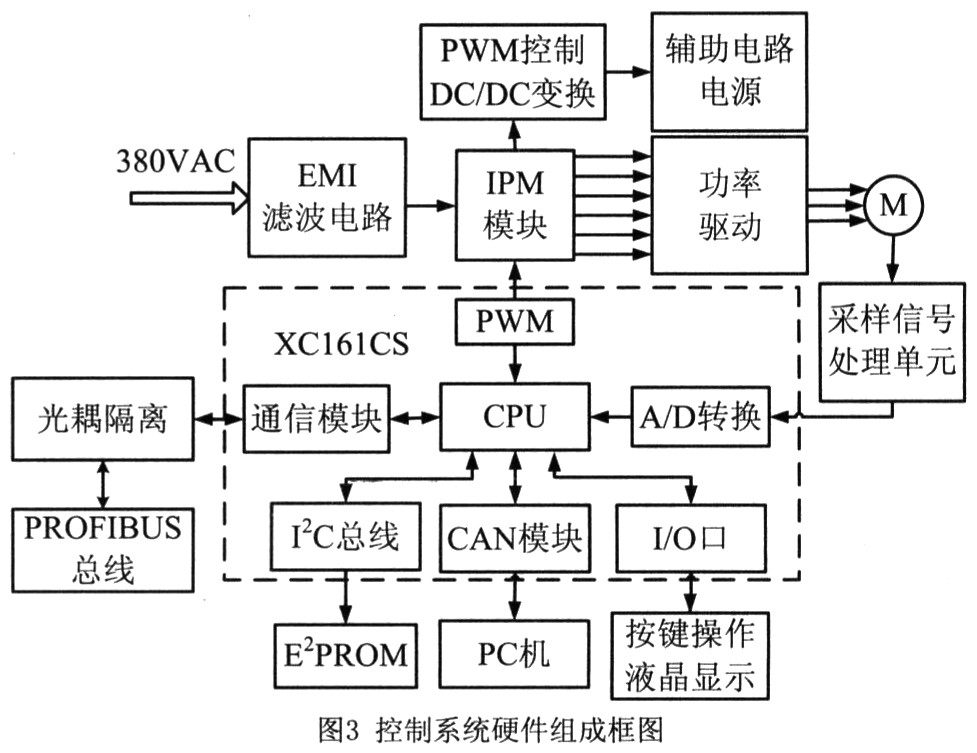
驱动电路,保护逆变驱动部分。并发送故障信号,记录故障信息,可以动态的掌握电动执行机构的工作状态。为了保证电动执行机构的自诊断功能的实现,设置24VDC电源接口,为随时掌握电动执行机构的工作状态提供了保障。防止辅助电源发生故障时,微处理器和故障监测电路仍能正常工作。可以发送和保存电动机的工作参数,故障参数。控制系统框图如图3所示。
2.2 控制系统软件设计
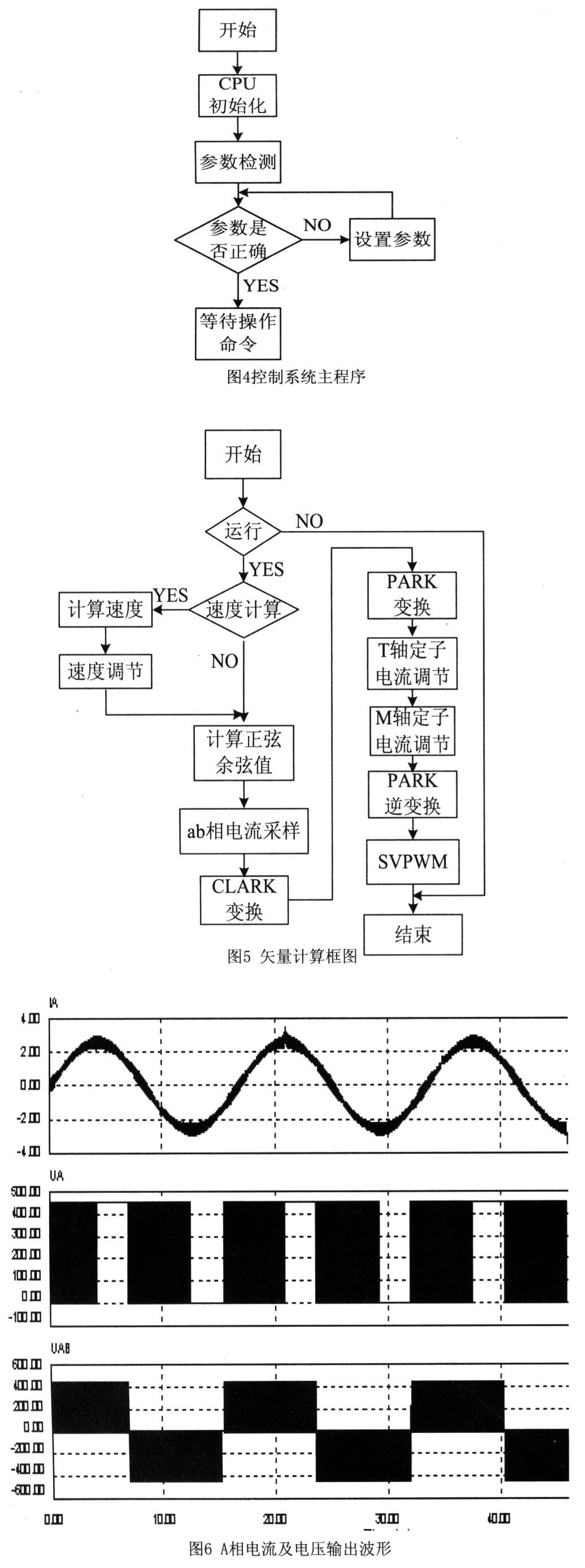
程序主要由三部分组成:系统初始化模块、控制模块和通信模块。初始化模块完成了微处理器寄存器的初始化、变量初始化及外围模块寄存器的初始化配置。系统控制模块主要包括PWM定时中断程序和自诊断中断程序。PWM中断程序是程序的核心部分,主要完成信号的采集和处理,以及控制算法的运算并产生控制逆变器功率器件工作的PwM信号;控制系统采用了空间矢量脉宽调试(SVPWM),可明显的减少逆变器输出电流的谐波成分。自诊断中断程序负责在系统出现故障时中断系统运行并完成相应保护且将故障数据存储在E2PROM中,。通信模块包括PC通信和工业现场总线通信两部分。主程序流程图如图4所示,矢量控制算法程序如图5所示。
3 仿真和实验结果
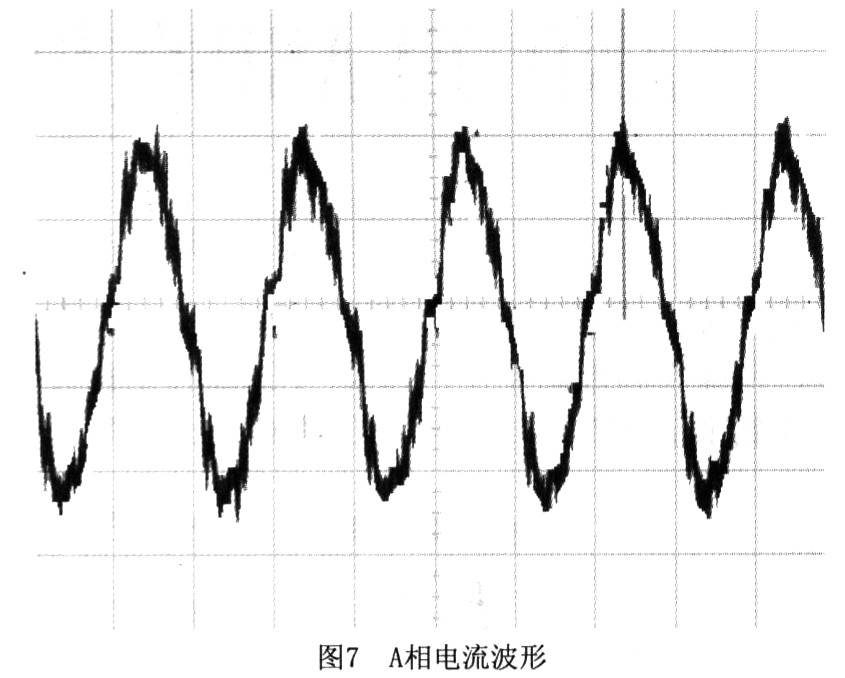
SIM是由POWERSIM公司开发的,专门用于电力电子及电机控制领域的专业化仿真软件。PSIM由PSIMSchematic、PSIMSimulator、SIMVIEW[6]三部分组成。PSIM simulator是仿真组件的核心,它使用高效能的算法克服了在其它软件中经常存在的仿真速度慢和计算结果不收敛等问题。极快的仿真速度使它可以同时分析高频和低频的效果,极大地减少了设计周期。SIMVIEW用来显示图形和仿真结果,提供各种图形控制和数据处理功能。拥有独一无二的仿真速度,具有仿真任何规模的电力电子和控制电路的能力,PSIM成为系统仿真、控制电路设计和电机驱动系统研究的理想工具。图6为仿真波形,图7为相电流波形。
4 结论
(1)从仿真结果中可以看出,基于XCl6lCS-32F的感应电机矢量控制系统具有良好的动静态特性,相电流呈现良好的正弦性。
(2)基于XCl6132CS—F的矢量控制系统经实验室验证,在电动执行机构上是可行的,且在太原第一热电厂经过了现场实验。由于工业现场对电动执行机构的要求较高,该矢量控制系统仍需要长期的现场调试改进。
